SLAM(スラム)
自律走行ロボットアプリ開発SLAMを使った自律走行型の
ロボットアプリ開発を行っています。
来たる自律型モビリティー社会
期待されるマシンの
自律走行/自動制御技術
人口減少中の国内において、労働生産性を確保する新たなイノベーションとして、AI、IoT、ビッグデータ、ロボティクスが注目されています。
そういったテクノロジーの進化により、人々の移動や運送の一部を、自律的に稼働するロボットや産業機械等によりカバーできる見込みが少しずつ立ってきております。
ヘッドウォータースでは、自律走行領域に2017年から着手し、自律移動型ロボティクスのアプリケーションを開発しております。

SLAMとは
自己位置推定と環境地図作成
SLAM(スラム)とは、自己位置推定と環境地図作成を同時に行うことを言い、Simultaneous Localization and Mappingが正式名称です。
掃除ロボットや自動運転技術にも使われている技術と言えばイメージが湧きやすいかもしれません。
ロボット自律走行に使われる技術
カメラ情報や赤外線センサー、ソナーセンサーなどを使い、現在のロケーションの環境を把握し、どの座標に障害物があり、どの座標が空いている空間なのかを認識します。
また、自己位置推定を同時に行う事で、移動できる場所や経路の情報を取得しています。
それらの情報とAIの組み合わせで更なる自律走行を目指そうと言う取組も始まっています。

事例
Pepperを使った自律移動とマップ共有
Pepperには、ユーザから近づかないと、そこから先のアプリが起動しないと言う課題がありました。
そこで、SLAMで作成したマップのエリア内をPepperが自律的に移動し
ユーザを発見したらPepperからアクションを行いインタラクションを
開始することでよりユーザに触ってもらうことを狙えないか、と考えました。
アプリ概要
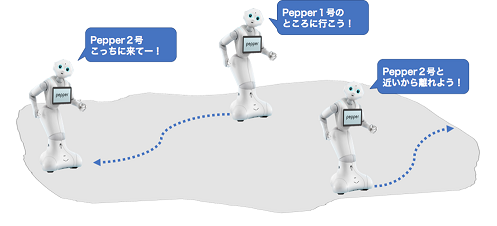
・1台で学習したSLAMのマップを複数台で共有
・共有したSLAMマップの中でそれぞれのPepperが自律的に移動
・それぞれのPepperはフロアマップ担当やQ&A担当など役割を与え
ユーザが求める役割のPepperをその場所まで呼び寄せることができる
・マップ、現在位置を共有しているため集合することや遠ざかることが可能
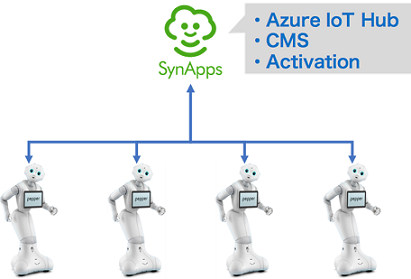
システム構成
クラウドロボティクスで複数台連携を可能にし、IoTHubでデバイス間データ通信し、マップ共有も行っています。
アプリCMSでロボット毎に役割を分け与え管理し、位置情報と役割に応じたアプリケーション配信を行っています。
イメージ動画
スマートモビリティ&ストア
自走型ロボット「Temi」を配置した
AZLM Connected Store
「AZLM connected store」は、アパレル、服飾雑貨、インテリア雑貨、食品、コスメなど約200~300種類の商品を揃える期間限定の「新たな気づきをもたらす」をテーマにした体験型店舗です。
「Amazon Pay」を活用したボイスコマース体験や、スマートフォン・スマートスピーカーによる商品説明、 自走型のパーソナルロボット「temi」によるリモート接客など、時代にマッチしたサービスを提供します。
完全キャッシュレスの支払いを実現し、スマホひとつで気軽にショッピングを楽しめる上、大きな商品は自宅への発送も可能です。
URL:https://www.headwaters.co.jp/service/dx/azlm_connected_store.html
自動走行車両
物流ロボ「CarriRo」×画像解析
物流支援ロボットCarriRo®は、ZMP社が開発に取り組む自動タクシー®のサービス実証に代表される自動運転技術を応用して開発された製品です。
SyncLectにディープラーニング技術を応用した画像解析エンジンを搭載し、ZMP社が提供する物流ロボ「CarriRo」と連携を行う事で、省人化・効率化を目的とした自律移動によって新たな付加価値を与えるモビリティDXを行っております。

無人フォークリフト
リアルタイム画像認識
当社では、独自の画像解析「SyncLect Detection」によって、荷物の映像外観判定AIを行っております。
フォークリフトに設置したカメラからパレットを照射し、ヒトが「どの荷物を積んでいるか」をAIにより判定することで、積載状況をリアルタイムにデジタル化します。
フォークリフトカメラは上に荷物を重ねていくと下側に積んだ荷物の外観が確認しづらくなる課題があり、積荷をリアルタイムでデータ化することでこの課題を解消できます。
インターネット回線が弱い環境でリアルタイム性を上げ複数モビリティによるカメラ解析を実現する為の技術として当社のエッジAI技術を利用しています。

オフラインIoT+AIエッジAI開発
AI+IoTにおける高速通信とオフライン化を実現するエッジAI構築を行っています。

ディープラーニング画像解析SyncLect Detection
ディープラーニングを用いた画像解析を行い、物体検知や映像解析、情景文字認識などを行っています。

5G時代のXRソリューション スマートグラスアプリ開発
スマートグラスを用いて、作業指示やビジョンピッキングなどに使えるアプリケーション開発を行っています。

AI活用型ナレッジ共有Pocket WorkMate
従業員教育における早期戦力化を実現するクラウドサービスを提供しています。外国人従業員教育向けにも。